Hello everybody. In this post I'm
going to talk about levitation. Levitation is the process by which and object
is suspended by a physical force against gravity, in a stable position without
solid physical contact. There are a number of different methods that are
available in order to levitate a matter, and these methods are:
1) Aerodynamic
levitation,
2) Magnetic
levitation,
3) Acoustic
levitation,
4) Quantum
levitation,
5) Electromagnetic
levitation
6) Electrostatic
levitation and
7) Optical
levitation
Aerodynamic levitation –
is the use of gas pressure to levitate materials so that they are no longer in
physical contact with any container. The term aerodynamic levitation could be
applied to many objects that use gas pressure to counter the force of gravity,
and allow stable levitation. Helicopters and air hockey pucks are two good
examples of objects that are aerodynamically levitated. However, more recently
this term has also been associated with a scientific technique which uses a
cone-shaped nozzle allowing stable levitation of 1-3mm diameter spherical
samples without the need for active control mechanisms.

Magnetic levitation - maglev,
or magnetic suspension is a method by which an object is suspended with no
support other than magnetic fields. In this case the magnetic pressure is used to
counteract the effects of gravitational and any other acceleration. There are
two stabilities of magnetically levitated objects and these stabilities are:
-
Static stability means that any small
displacement of levitated object from a stable equilibrium position will cause
a net force to push it back to the equilibrium point.
-
Dynamic stability occurs when the levitation
system is able to damp out any vibration-like motion that may occur.
For successful levitation and
control of all 6 axes (3 spatial and 3 rotational) a combination of permanent
magnets and electromagnets or diamagnets or superconductors as well as
attractive and repulsive fields can be used. From Earnshaw's theorem at least
one stable axis must be present for the system to levitate successfully, but
the other axes can be stabilized using ferromagnetism.The primary ones used in
maglev trains are servo-stabilized electromagnetic suspension (EMS),
electrodynamic suspension (EDS).
Acoustic
Levitation is a method for suspending matter in a medium by using
acoustic radiation pressure from intense sound waves in the medium. Acoustic
levitation is possible because of the nonlinear effects of intense sound waves.
The objects can be levitated with sound which is heard by the human ear or the
sound that levitates object is far from human hearing range.
The first
theoretical study was done by L.V.King in 1934 in a paper called “On the
Acoustic Radiation Pressure on Spheres”. Unfortunately it was only theoretical
because it wasn’t possible to develop the machine that would levitate objects.
In 70s and 80s the acoustic levitation was a field of research for NASA and MIT
engineers. There is couple of studies available on the internet. In 2013 Swiss
scientists made controllable acoustic levitator. So far the levitators could
levitate the objects but these hovering objects where motionless. Now they can
controllably move these hovering objects.


Acoustic
levitation is usually used for containerless processing which has become more
important of late due to the small size and resistance of microchips and other
such things in industry. Containerless processing may also be used for
applications requiring very-high-purity materials or chemical reactions too
rigorous to happen in a container. This method is harder to control than other
methods of containerless processing such as electromagnetic levitation but has
the advantage of being able to levitate nonconducting materials.
Here are couple of videos:
There are many
ways of creating this effect, from creating a wave underneath the object and
reflecting it back to its source, to using an acrylic glass tank to create a
large acoustic field.
Quantum levitation as it
is called is a process where scientists use the properties of quantum physics
to levitate an object (specifically, a superconductor) over a magnetic source
(specifically a quantum levitation track designed for this purpose).

The Science of Quantum
Levitation-The reason this works is something called the Meissner
effect and magnetic flux pinning. The Meissner effect dictates that a
superconductor in a magnetic field will always expel the magnetic field inside
of it, and thus bend the magnetic field around it. The problem is a matter of
equilibrium. If you just placed a superconductor on top of a magnet, then the
superconductor would just float off the magnet, sort of like trying to balance
two south magnetic poles of bar magnets against each other.

Superconductivity and magnetic field do not
like each other. When possible, the superconductor will expel all the magnetic
field from inside. This is the Meissner effect. In our case, since the
superconductor is extremely thin, the magnetic field DOES penetrate. However,
it does that in discrete quantities (this is quantum physics after all! )
called flux tubes. (Note: This is demonstrated in the graphic associated with
this article.)Inside each magnetic flux tube superconductivity is locally
destroyed. The superconductor will try to keep the magnetic tubes pinned in
weak areas (e.g. grain boundaries). Any spatial movement of the superconductor
will cause the flux tubes to move. In order to prevent that the superconductor
remains "trapped" in midair. Let's think about what a superconductor
really is: it's a material in which electrons are able to flow very easily.
Electrons flow through superconductors with no resistance, so that when
magnetic fields get close to a superconducting material, the superconductor
forms small currents on its surface, cancelling out the incoming magnetic
field. The result is that the magnetic field intensity inside the surface of
the superconductor is precisely zero. If you mapped the net magnetic field
lines (again, see the graphic) it would show that they're bending around the
object. When a superconductor is placed on a magnetic track, the effect is that
the superconductor remains above the track, essentially being pushed away by
the strong magnetic field right at the track's surface. There is a limit to how
far above the track it can be pushed, of course, since the power of the
magnetic repulsion has to counteract the force of gravity.
A disk of a
type-I superconductor will demonstrate the Meissner effect in its most extreme
version, which is called "perfect diamagnetism," and will not contain
any magnetic fields inside the material. It'll levitate, as it tries to avoid
any contact with the magnetic field. The problem with this is that the
levitation isn't stable. The levitating object won't normally stay in place.
(This same process has been able to levitate superconductors within a concave,
bowl-shaped lead magnet, in which the magnetism is pushing equally on all
sides.)One of the key elements of the quantum locking process is the existence
of these flux tubes, called a "vortex". If a superconductor is very
thin, or if the superconductor is a type-II superconductor, is costs the
superconductor less energy to allow some of the magnetic field to penetrate the
superconductor. That's why the flux vortices form, in regions where the
magnetic field is able to, in effect, "slip through" the superconductor.
In the case described by the Tel Aviv team above, they were able to grow a
special thin ceramic film over the surface of a wafer. When cooled, this
ceramic material is a type-II superconductor. Because it's so thin, the
diamagnetism exhibited isn't perfect ... allowing for the creation of these
flux vortices passing through the material.
Flux vortices can also form in
type-II superconductors, even if the superconductor material isn't quite so
thin. The type-II superconductor can be designed to enhance this effect, called
"enhanced flux pinning."
Other Types of Quantum Levitation
The process of quantum levitation
described above is based on magnetic repulsion, but there are other methods of
quantum levitation that have been proposed, including some based on the Casimir
effect. Again, this involves some curious manipulation of the electromagnetic
properties of the material, so it remains to be seen how practical it is.
The Future of Quantum Levitation
Unfortunately, the current
intensity of this effect is such that we won't have flying cars for quite some
time. Also, it only works over a strong magnetic field, meaning that we'd need
to build new magnetic track roads. However, there are already magnetic levitation
trains in Asia which use this process, in addition to the more traditional
electromagnetic levitation (maglev) trains. Another useful application is the
creation of truly frictionless bearings. The bearing would be able to rotate,
but it would be suspended without direct physical contact with the surrounding
housing, so that there wouldn't be any friction. There will certainly be some
industrial applications for this, and I'll keep my eyes open for when they hit
the news.
Electrostatic
levitation is the process of using an electric field to levitate a
charged object and counteract the effects of gravity. It was used, for
instance, in Robert Millikan's oil drop experiment and is used to suspend the
gyroscopes in Gravity Probe B during launch.
Due to
Earnshaw's theorem no static arrangement of classical electrostatic fields can
be used to stably levitate a point charge. There is an equilibrium point where
the two fields cancel, but it is an unstable equilibrium. By using feedback
techniques it is possible to adjust the charges to achieve a quasi-static
levitation.
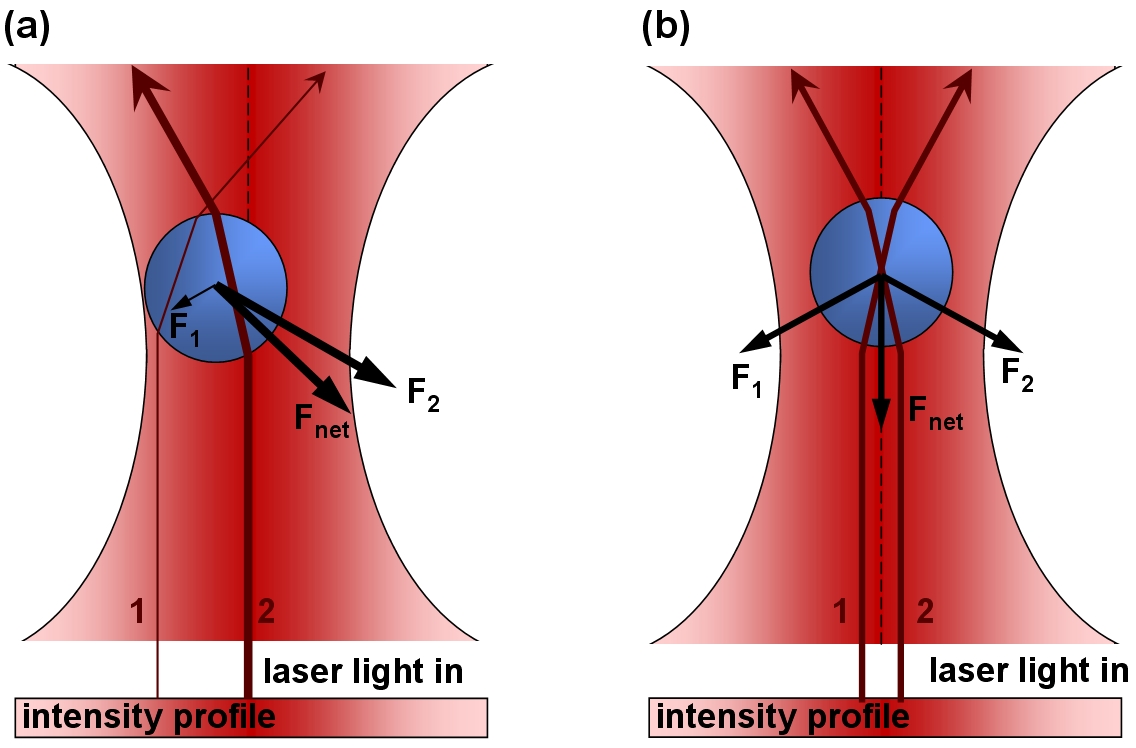
Optical levitation is a
method whereby a material is levitates against downward force of gravity by an
upward force stemming from photon momentum transfer. Typically photon radiation
pressure of a vertical upwardly directed and focused laser beam of enough
intensity counters the downward force of gravity to allow for a stable optical
trap capable of holding small particles in suspension.